Method Overview
TLDR
We propose a significantly simpler single-scale one-shot global matching to address the scene flow estimation.
Our key finding is that reliable feature similarity between point pairs is essential and sufficient to estimate accurate scene flow.
Method
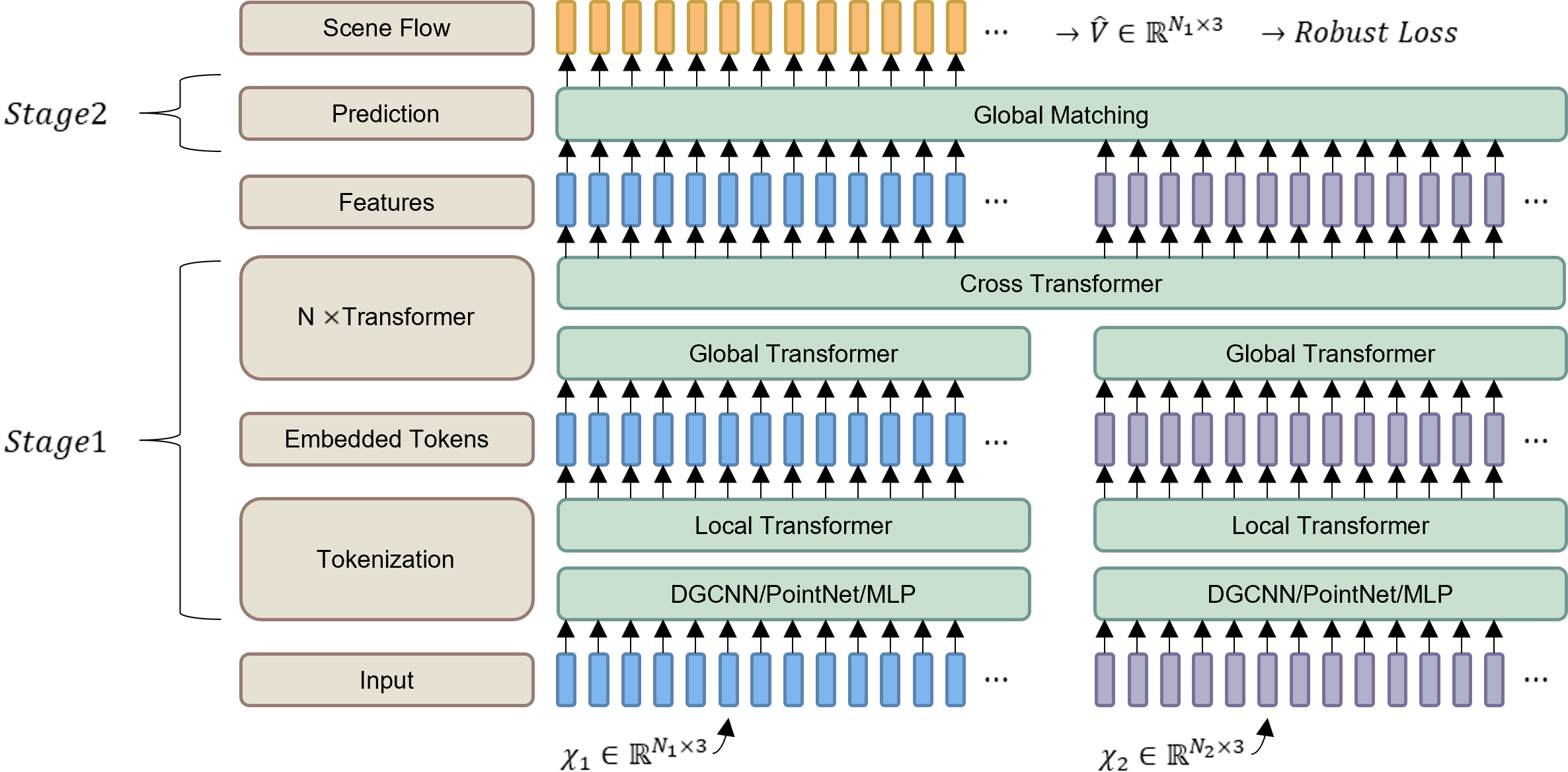
We propose Global Matchin Scene Flow (GMSF). Our approach consists of three main contributions:
- A hybrid local-global-cross transformer architecture is introduced to learn accurate and robust feature representations of 3D point clouds.
- Based on the similarity of the hybrid features, we propose to use a global matching process to solve the scene flow estimation.
- Extensive experiments on popular datasets show that the proposed method outperforms previous scene flow methods by a large margin.
BibTeX
@article{zhang2023gmsf,
title={GMSF: Global Matching Scene Flow},
author={Zhang, Yushan and Edstedt, Johan and Wandt, Bastian and Forss{\'e}n, Per-Erik and Magnusson, Maria and Felsberg, Michael},
journal={arXiv preprint arXiv:2305.17432},
year={2023}
}